SUPERFICIES
DE POLÍGONOS
Cualquier objeto tridimensional
puede representarse como un conjunto de superficies poligonales planas.
Para algunos objetos, como un polihedro,
esto define precisamente las características de la superficie. En otros casos,
una representación de un polígono ofrece una descripción aproximada del objeto.
En la figura 1.1 se despliega un objeto solido modelado como una malla de
superficies poligonales. Esta representación de la malla de polígonos puede
desplegarse rápidamente para dar una indicación general de la estructura del
objeto y la aproximación puede mejorarse dividiendo las superficies del objeto
en caras poligonales menores.

Cada polígono de un objeto puede especificarse en un paquete de graficas mediante comando de líneas o de llenado de áreas para definir las coordenadas del vértice. Los paquetes CAD a menudo permiten a los usuarios introducir posiciones para el vértice junto con fronteras de polígonos con métodos interactivos. Estos vértices pueden representar el resultado de la digitalización de un trazo o bien pueden ser introducidos por un diseñador que este creando una nueva figura.
TABLAS DE POLÍGONOS
Una vez que el usuario haya definido cada superficie del polígono, el paquete de graficas organiza los datos de entrada en las tablas que utilizaran en el procesamiento y despliegue de las superficies. Las tablas de datos contienen las propiedades geométricas y de atributos del objeto, organizadas para facilitar el procesamiento. Las tablas de datos geométricos contienen coordenadas y parámetros de fronteras para identificar la orientación en el espacio de las superficies poligonales. La información de atributo del objeto incluye designaciones de cualquier modelo de color y sombreado que se aplicara a las superficies.
Los datos geométricos pueden
organizarse de varias maneras. Un método adecuado para almacenar información de
coordenadas consiste en crea tres listas: una tabla de vértices, una de aristas
y una de polígonos. Los valores coordenados de cada vértice del objeto se
almacenan en la tabla de vértices. La tabla de aristas enlistan los vértices
extremos que definen a cada arista. Cada polígono se define en la tabla de
polígonos como una lista de aristas componentes. Este esquema se ilustra la
figura 1.2 para un objeto que consta de dos superficies poligonales. La tabla
de polígonos contiene apuntadores que indican la tabla de aristas, la cual, a
su vez, contiene apuntadores que señalan los valores coordenados en la tabla de
vértices. Cuando en una escena se va a representar más de un objeto, cada uno
puede identificarse en una tabla de objetos por medio del conjunto de
superficies poligonales en la tabla de polígonos que definen a ese objeto.
El listado de los datos
geométricos en tres tablas, como se muestra en la figura 1.2, ofrece una
referencia adecuada de los componentes (vértices, aristas y polígonos) de un
objeto. Así mismo, el objeto puede desplegarse eficazmente mediante el uso de
datos de la tabla de aristas para trazar las líneas componentes. Sin la tabla
de aristas, el objeto se desplegaría utilizando datos de la tabla de polígonos
y esto quiere decir que algunas líneas se trazarían dos veces. Si tampoco se
dispusiera de la tabla de vértices, la tabla de polígonos tendría que enlistar
coordenadas explicitas de cada uno de los vértices de cada polígono. Toda la
información referente a vértices y aristas tendría que reconstruirse a partir
de la tabla de polígonos y las posiciones coordenadas se duplicarían para los
vértices situados en la frontera de dos o más polígonos.

Podría incorporarse
información adicional en las tablas de datos de la figura 1.2 para lograr una
más rápida extracción de la información.
Por ejemplo, podría extenderse la tabla de aristas para incluir
apuntadores en la tabla de polígonos de modo que pudieran identificarse aristas
comunes entre polígonos de mayor rapidez (fig. 1.3). Esto es particularmente
útil cuando se aplican modelos de sombreado a las superficies, con los patrones
de sombreado que varían ligeramente de un polígono al siguiente. Tambien podría
ampliarse la tabla de vértices haciendo referencia cruzada de vértices para las
aristas correspondientes.

Ya que las tablas de datos
geométricos pueden contener listados extensos de vértices y de aristas de
objetos complejos, es importante que los
datos se verifiquen en consistencia y completitud. Cuando se especifican
definiciones de vértices, líneas y polígonos, es posible que pudieran cometerse
ciertos errores de entrada que distorsionarían el despliegue del objeto. Cuanta
mas información se incluya en las tablas de datos, más fácil será verificarla.
Algunas de las pruebas que podrían realizar un paquete de graficas son:
(1) Que todos y cada uno
de los vértices se enliste como un extremo de cuando menos dos líneas.
(2) Que toda línea sea parte
cuando menos de un polígono.
(3) Que todo polígono sea
cerrado.
(4) Que cada polígono
tenga al menos tenga un arista compartida.
(5) Si la tabla de
aristas contiene apuntadores a polígonos, que toda arista referenciada por un
apuntador de polígono tenga un apuntador reciproco hacia el polígono.
ECUACIONES
DE PLANO
Los parámetros que
especifican la orientación especial de cada polígono se obtienen de los valores
coordenados de los vértices y las ecuaciones que definen los planos poligonales. Estos
parámetros de planos se utilizan en transformaciones de visión, modelos de
sombreado y algoritmos de superficies ocultas que determinan que líneas y
planos se traslapan a lo largo de la línea de visión.
La ecuación de una
superficie plana puede expresarse así: Ax + By + Cz + D
= 0
Donde (x,y,z) es cualquier punto de plano. Los coeficientes A, B, C, D son
constantes que pueden calcularse utilizando los valores coordenados de tres
puntos no coloniales en el plano. Comúnmente, se usan las coordenadas de tres
vértices sucesivos en una frontera de un polígono para hallar valores de estos
coeficientes. Al denotar las coordenadas de tres vértices de un polígono como (x1, y1, z1), (x2, y2, z2) y
(x3, y3, z3),
se puede resolver el siguiente conjunto de ecuaciones planas simultáneas para
las razones A/D, B/D y C/D:
(A / D)xi + (B / D)yi + (C / D)zi = -1 i = 1, 2,
3
Utilizando un método
de solución como la regla de Cramer, se puede escribir la solución de los
parámetros del plano en forma de determinantes:

Podemos ampliar los
determinantes y escribir los cálculos de los coeficientes del plano en la forma
explícita:
A = y1(z2
− z3 ) + y2 (z3 − z1) + y3(z1 − z2
)
B = z1(x2
− x3 ) + z2 (x3 − x1) + z3(x1 − x2
)
C = x1(y2
− y3 ) + x2 (y3 − y1) + x3(y1 − y2
)
D = −x1(y2z3
− y3z2 ) − x2 (y3z1 − y1z3 ) −
x3(y1z2 − y2z1)
Los valores de A, B,
C y D se almacenan en la estructura de datos que contiene la información de
coordenadas y atributos referente al polígono definido en este plano.
La orientación de una
superficie plana se especifica por medio del vector normal al plano, como se
muestra en la figura 1.4.Este vector normal tridimensional tiene las
coordenadas cartesianas (A, B, C).

Puesto que con frecuencia
trabajamos con superficies poligonales que encierran un objeto interior, se
necesita distinguir entre los lados de la superficie.
El lado del plano que
da la cara al objeto interior se denomina “interior” y el lado visible o
externo se llama “exterior”. Si se especifican vértices en un sentido igual al
del reloj cuando se observa el lado externo del plano en su sistema coordenado
por la derecha, la dirección del vector normal ira de adentro hacia afuera.
Esto se demuestra para un plano de un cubo unitario de la figura 1.5.
Para determinar los
componentes del vector normal de la superficie sombreada que se muestra en la
figura 1.5, se seleccionan tres de los cuatros vértices situados a lo largo de
la frontera del polígono.

Estos puntos se
seleccionan en un sentido igual al del reloj cuando observamos el exterior del
cubo hacia el origen.
Las coordenadas de
estos vértices, en el orden seleccionado, se utilizan en la ecuacion de la figura 1.4 a
fin de obtener los coeficientes del plano:
A = 1, B = 0, C = 0,
D = -1. El vector normal de este plano esta en el sentido del eje x positivo.Las ecuaciones del
plano se utiliza también para identificar puntos interiores y exteriores.
Cualquier punto (x, y, z) exterior aun plano satisface la desigualdad.
Ax + By + Cz + D > 0
Análogamente,
cualquier punto situado en el interior del plano produce un valor negativo de
la expresión Ax + By + Cz + D. Para
la superficie sombreada de la figura 1.5, cualquier punto exterior al plano
cumple la desigualdad x - 1 < 0, mientras que cualquier punto interior al plano tiene un valor de
coordenadas x menor que 1.
SUPERFICIES CURVAS
Los despliegues tridimensionales de las superficies curvas pueden
generarse a partir de un conjunto de entrada de las funciones matemáticas que
define las superficies o bien a partir
de un conjunto de puntos de datos especificados por el usuario. Cuando se
especifican funciones de curvas, un paquete puede emplear las ecuaciones
definidoras para localizar y graficar posiciones de pixeles a lo largo de la
trayectoria de la curva, casi igual como sucede con las curvas en dos
dimensiones. Un ejemplo de la clase de superficies que pueden generarse a
partir de una definición funcional se da en la figura 1.6. A partir de un
conjunto de datos de entrada, un paquete determina las descripciones
funcionales de la curva que mejor se ajusta
a los puntos de datos según las restricciones de la aplicación. En la
figura 1.7 se muestra un objeto cuyas superficies curvas pueden ser definidas
por un conjunto de entrada de punto de datos.

Podemos representar una línea curva tridimensional en forma analítica
con la pareja de funciones.
Con la coordenada x seleccionada como variable independiente. Los
valores de las variables dependientes y, z se
determinan después a partir de las ecuaciones 1.6 a medida que se avanza a
través de valores de x de un extremo de la línea al otro. Esta representación
tiene algunas desventajas. Si se desea una grafica alisada, se debe cambiar la
variable independiente siempre que la primera derivada (pendiente) de f(x) o bien g(x) se vuelve
mayor que 1. Esto significa que se debe verificar continuamente los valores de
las derivadas, que pueden volverse infinitas en algunos puntos. Asimismo, las
ecuaciones anteriores ofrecen un formato desproporcionado para representar
funciones con valores múltiples. Una representación más propicia de las curvas
para aplicaciones de las graficas es en términos de ecuaciones
paramétricas.

ECUACIONES
PARAMÉTRICAS
Mediante la introducción de un cuarto
parámetro, u, en la descripción coordenada de una curva, se puede expresar cada una de las
tres coordenadas cartesianas en forma paramétrica. Cualquier punto de la curva
puede representarse entonces por medio de la función vectorial.
P(u) = (x(u),y(u),z(u)
Por lo general, las
ecuaciones paramétricas se constituyen de manera que el parámetro
se defina en el intervalo de 0 a 1. Por
ejemplo, una circunferencia en el plano xy con centro en el origen coordenado
podría definirse en forma paramétrica como:

También son posibles
otras formas paramétricas para describir circunferencias y arcos circulares.
En el caso de una curva
arbitraria, puede ser difícil idear un conjunto de ecuaciones paramétricas que
define completamente la forma de la curva. Pero cualquier curva puede aproximarse utilizando diferentes
conjuntos de funciones paramétricas sobre partes diferentes de la curva. Por lo
general estas aproximaciones se formar con funciones polinomiales. Dicha
construcción por partes de una curva debe implantarse cuidadosamente para
asegurar de que haya transición sencilla de una sección de la curva a la
siguiente. La uniformidad de una curva puede describirse a partir de la continuidad de la curva entre las
secciones. La continuidad de orden cero se refiere simplemente a que las curvas
se interceptan. Continuidad de primer orden significa que las líneas tangentes
(primeras derivadas) de dos secciones adyacentes de la curva son la misma en el
punto de adyacencia. Continuidad de segundo orden quiere decir que las curvaturas
(segundas derivadas) de las dos secciones de la curva son las mismas en la
intersección. La figura 1.8 muestra ejemplos de los tres órdenes de
continuidad.

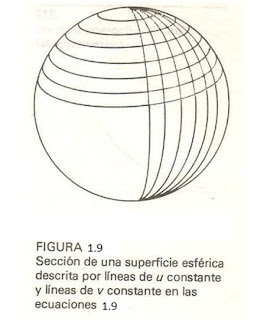
Las ecuaciones paramétricas
de las superficies se formulan con dos parámetros u y v. Una posición coordenada de una superficie se representa entonces por medio de
la función vectorial paramétrica.
P(u,v) = (x(u,v), y(u,v), z(u,v))
Las ecuaciones de las
coordenadas x,y,z a menudo se acomodan de modo que los
parámetros u y v están definidos dentro del intervalo de 0 a 1.Por
ejemplo una superficie esférica puede describirse con las ecuaciones.

Donde r es el radio de la esfera. El parámetro u describe líneas de latitud constante sobre la
superficie, mientras que el parámetro v describe líneas de longitud constante. Al
mantener uno de estos parámetros fijo mientras se varía el otro sobre cualquier
valor dentro del intervalo de 0 a 1, se podrían trazar líneas de latitud y
longitud de cualquier sección esférica (fig. 1.9).

En aplicaciones de
diseño, una curva o superficie a menudo se define especificando
interactivamente un conjunto de puntos de control, los cuales indican la forma
de la curva. Estos puntos de control son usados por el paquete para formar
ecuaciones paramétricas polinomiales para desplegar la curva definida. Cuando
la curva desplegada pasa a través de los puntos de control, como en la figura
1.10 se dice que interpola los
puntos de control.

Por otro lado, se dice
que los puntos de control se aproximan
si la curva desplegada pasa cerca de ellos (fig.1.11). Existen muchas técnicas
para constituir ecuaciones paramétricas polinomiales de curvas y superficies,
dadas las coordenadas de los puntos de control. Entre los métodos básicos para
desplegar curvas específicas con punto de control se
incluyen las formulaciones de Bézier y “spline”.

INTEGRANTES:
SANTIGO CRUZ ROSA ELVIA
CARLOS DE LA CRUZ LORENA LIZETH
MENDOZA HERNANDEZ DAYSI YANET
OSORIO CRUZ ESMERALDA
BIBLIOGRAFIA:
GRAFICAS POR COMPUTADORA
DONAL HEARN/M.PAULINE BAKER
PAGINAS CONSUÑTADAS 204 - 211
No hay comentarios:
Publicar un comentario