2.3 COMPOSICION DE TRANSFORMACIONES BIDIMENSIONALES
Usando la representación de matrices, podemos establecer una matriz para cualquier secuencia de transformaciones como una matriz de transformación compuesta al calcular el producto de la matriz de las transformaciones individuales. La formación de productos con las matrices de transformación a menudo se le conoce como concatenación o composición de matrices. Entonces se puede decir, que una transformación compuesta bidimensional es una secuencia de transformaciones, una tras otra.
Traslaciones Compuestas Bidimensionales
Dos traslaciones sucesivas de un objeto pueden efectuarse eslabonando primero las matrices de traslación, aplicando después la matriz compuesta a los puntos coordenados. Especificando las dos distancias de traslación sucesivas como (Tx1, Ty1) y (Tx2, Ty2), se calcula la matriz compuesta como:

Que demuestra que dos traslaciones sucesivas son adictivas. La ecuación anterior puede escribirse como:
T (Tx1, Ty1) * T (Tx2, Ty2) = T (Tx1 + Tx2, Ty1, + Ty2)
La transformación de puntos coordenados de una traslación compuesta se expresa entonces en forma de matriz como:
P’ = P * T (Tx1 + Tx2, Ty1 + Ty2)
Escalaciones Compuestas Bidimensionales
El eslabonamiento de matrices de transformación de dos operaciones sucesivas de escalación produce la siguiente matriz de escalación compuesta:

S (Sx1, Sy1) * S (Sx2, Sy2) = S (Sx1 * Sx2, Sy1 * Sy2)
La matriz resultante en este caso indica que las operaciones de escalación sucesivas son multiplicativas. Es decir, si se triplicara el tamaño de un objeto dos veces en sucesión, el tamaño final sería nueve veces el del original.
Rotaciones Compuestas Bidimensionales
La matriz compuesta de dos rotaciones sucesivas se calcula como:


Como sucede en el caso de las traslaciones, las rotaciones sucesivas son adictivas.
Escalación del punto fijo general
Utilizando las matrices de transformación de la traslación y reduciendo a escala, se puede obtener la matriz compuesta para la escalación con respecto a un punto fijo (xF, yF) considerando una secuencia de tres transformaciones. Para realizar esta transformación compuesta se deben seguir los siguientes pasos.
· Primero, todas las coordenadas se trasladan de modo que el punto fijo se mueva al origen coordenado.
·
Segundo, las coordenadas se reducen a escala con respecto al origen.
·
Tercero, las coordenadas se trasladan de manera que el punto fijo se devuelve a su posición original.
Las multiplicaciones de matrices de esta secuencia producen

Y la matriz correspondiente sería de la siguiente manera:

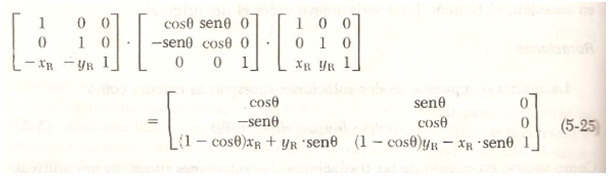
Rotación General Sobre un Punto de Pivote Bidimensional
La siguiente figura muestra una sucesión de transformaciones para obtener la matriz compuesta de la rotación con respecto a un punto pivote especificado (xR, yR).

· Primero, el objeto se traslada de manera que el punto pivote coincida con el origen coordenado.
·
Segundo, se hace girar el objeto alrededor del origen.
·
Tercero, el objeto se traslada de modo que el punto pivote retorne a su posición original.
Esta secuencia se representa por el producto matricial:
Propiedades de Concatenación
La multiplicación de matrices es asociativa. Para tres matrices cualesquiera A, B y C, el producto matricial A·B·C, puede obtenerse multiplicando primero A por B o multiplicando primero B por C:
Vease la siguiente ecuación...
A·B·C = (A·B) ·C = A· (B·C)
Por tanto, podemos evaluar los productos matriciales al utilizar una agrupación asociativa ya sea de izquierda a derecha o de derecha a izquierda. Por otro lado, los productos de la transformación tal vez no sean conmutativos. En general el producto matricial A·B no es igual que B·A. Esto significa queremos trasladar y girar un objeto, debemos tener cuidado sobre el sentido en que se evalúa la matriz compuesta.


Como un ejemplo, se podrían realizar dos rotaciones sucesivas en cualquier sentido y la posición final sería la misma. Esta propiedad conmutativa también se aplica para dos traslaciones sucesivas o dos escalaciones sucesivas. Otro par conmutativo de operaciones es la rotación y la escalación uniforme. (Sx = Sy).
INTEGRANTES:
JORGE EDUARDO GARCIA MORALES
ADAN BAUTISTA VARGAS
LEEN CRHISTIAN ANASTASIO HERNANDEZ
JUAN DE DIOS AGUILAR MARTINEZ
Donald Hearn / M. Pauline Baker. Graficas por computadora. Ed. Prentice Hall Hispanoamericana.
Wright, Richard. Programación en OpenGL. Anaya Multimedia.
Al trabajar con la multiplicacion de matrices, al principio se mi hizo un poco difícil por que había alvido como multiplicar estas matrices, pero con poco de practica y estudio, pues ya empiezo a dominar estos métodos.
ResponderEliminarAl principio no entendia nada sobre el tema de coordenadas homegenas, porque se me dificultaba porque no sabia multiplicar matrices, a medida que fui entendiendo los metodos de multiplicacion de matrices se me hizo muy sencilllo y practico el utilizar estos metodos con las coordenadas homogeneas y pues a la hora de programar estas coordenadas basta con utilizar un solo metodo de multiplicacion...
ResponderEliminar